This post is about MPU6050 Gyro+Acceleromter settings on the Hobbyking KK2.1 Flight Controller board. The meaning of these settings didn't seem obvious to me, neither the effect on how to multicopter would fly with different values so I write this to help me and others to get a deeper understanding on it. These settings are available from the menu of the Steveis firmware version. Here you can get last version, mine is 1.11S1 (December 2013)


Full Scale Range
The values for Gyro(deg/sec) and Acc(+/-g) are the full scale range of each sensor. The MPU6050 can be configured with different scale ranges, individually for Gyroscopes and Accelerometers:

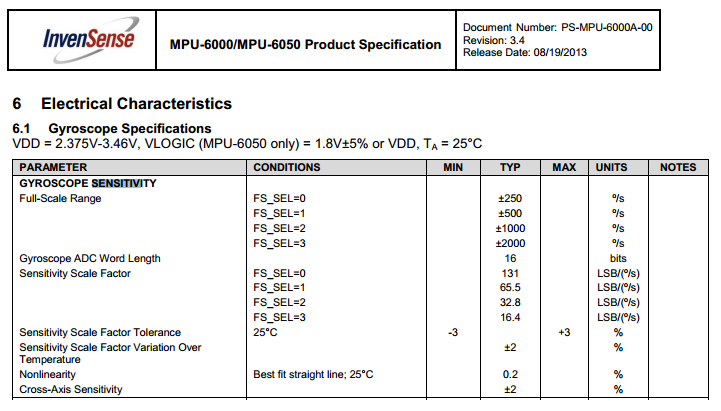
MPU6050 uses 16bit sigma-delta ADC for gyros and accs. Examining the values in the above tables we can know the minimun value that can be measured with each scale range, that is defined by the value of 1 bit (LSB) in sensor units.

So the conclusion of this is that for a bigger range we get a less accurate measurement, as the minimum value (Least Significant Bit) increases. For example, with a range of +-16g for the accelerometer we just can distinguish values of 0.49mg, while it is 0.06mg for a scale of +-2g.
For getting advantage of this knowledge we should know what are the values that occurs in a multicopter in the air, values produced by wind or by user input. Then we should set the minimum necessary range to cover our work values, so we have the best possible accuracy and also because of what is mentioned below.
I couldn't get any schematic of the internals of MPU6050, but I suppose that roughly it is something like this (taken from the Analog Devices AN-396 accelerometer),

Basically a pre amplifier followed by an amplifier which gain is what is modified to change the scale factor. So, as it is recommended in its datasheet, never use more gain than is needed to provide a convenient scale factor, as the buffer gain not only amplifies the signal but any noise or drift as well. So the ideal range will be the minor one while covering the range of deg/sec and g the multicopter will move.
I don't know yet acceleration values (g) or angles rate of change (deg/sec) that a multicopter is exposed. I depends of course on the type of flying you are doing (acro or smooth fpv). I plan to take them from experimental values using the logging function on my CRIUS AIOP 2.0. One reference I have found is this from a technical article on context recognition, that could give an idea of acceleration of well known movements for us:
 |
Low pass Filter
The MPU6050 has a user programmable low pass filter that affects equally to gyro and accelerometer. These are the possible frequency values:

In the end this value is used to filter unwanted deviations due to noise or vibrations affecting the multicopter, beacuse meaningful changes due to user input or wind are not supposed to have a frequency greater than 250Hz (1/250Hz = 4ms).
Just to help a little bit more, I leave this comment from the multiwii MPU6050_config.h config file, it is not a KK2.1 software but the information could be useful to understand the effects of LPF on multicopter behaviour:
/* MPU6050 Low pass filter setting. In case you cannot eliminate all vibrations to the Gyro, you can try
to decrease the LPF frequency, only one step per try. As soon as twitching gone, stick with that setting.
It will not help on feedback wobbles, so change only when copter is randomly twiching and all dampening and balancing options ran out. Uncomment only one option!
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID's after changing LPF.*/